
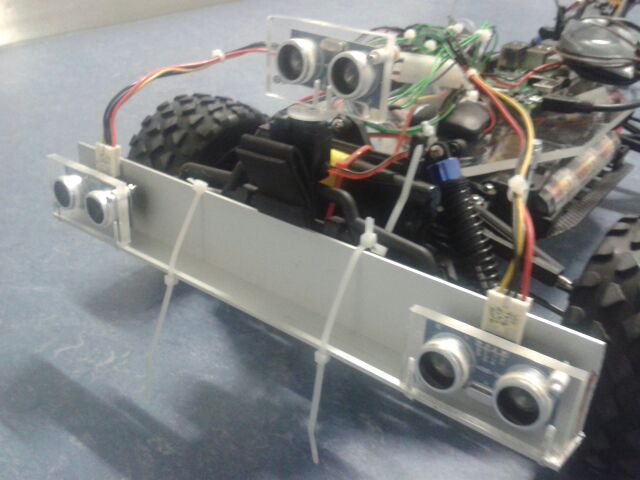
It's time to open the eyes! We provide our car, meanwhile named MARVON, with a set of three ultrasonic sensors. Now the robot is aware of obstacles and prepared to find its way through unknown environments. We decided to put two static sensors in front of the car searching for obstacles directly in front of the robot. One sensor was mounted on a servo scanning the environment around the car to build a map.

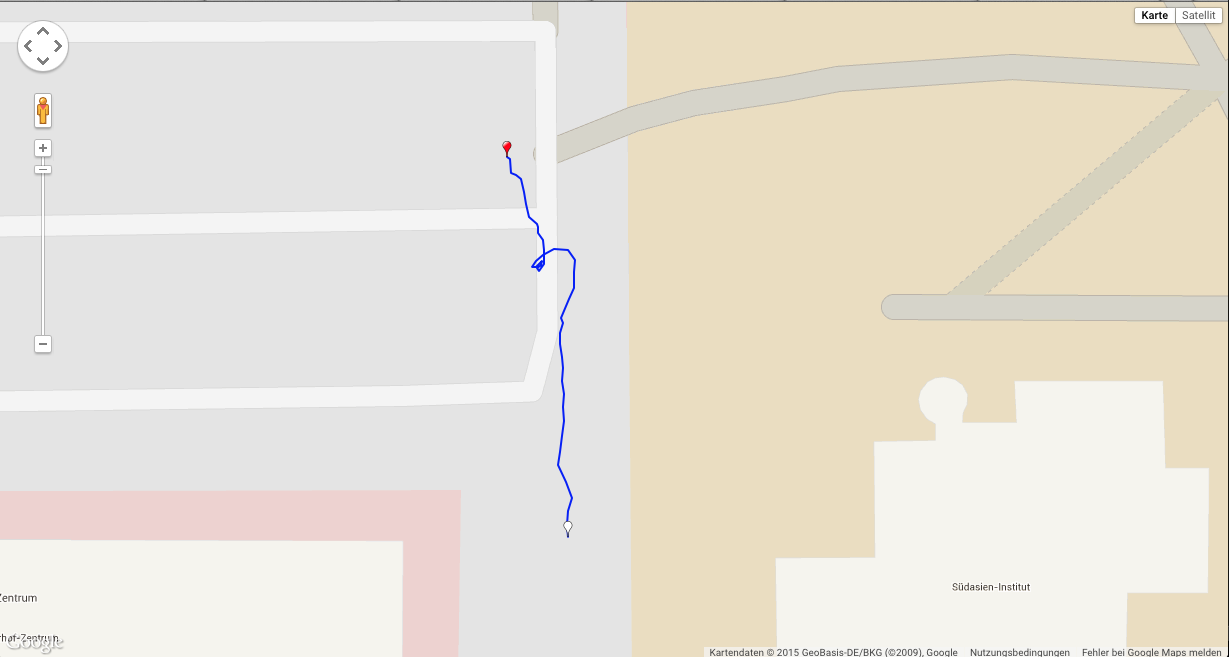
After many sensorical tests and writing of code to extract the distance to obstacles a first tests of a quickly written programm to test the design worked nicely. Also a piece of code for reading in GPS data is in place and a quick check of functionality brought good results. E.g. we are able to overplot Google Maps with our track. See this picture!
Furthermore we decided to build or own shell for the robot to protect it from wetness. Therefore we went to a local construction market and bought Plexi glas and plaster. We took a plaster copy of the normal shell, put it into our oven togehter with the Plexi glas and formed it to a new transparent shell. This has two advantages. First we have more space for the electronics and second the transparency gives the opportunity to see what "happens inside".

Status report
Hardware in place
helping code snippets written
design concept in place
soo...